Mostrar el registro sencillo del ítem
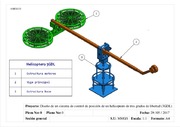
Diseño de un sistema de control de posición de un helicóptero de tres grados de libertad (3GDL)
| dc.contributor.advisor | González Acevedo, Hernando | spa |
| dc.contributor.author | Angulo Uribe, Alexander | spa |
| dc.contributor.author | García Ardila, Joan Sneider | spa |
| dc.coverage.spatial | Colombia | spa |
| dc.date.accessioned | 2021-02-11T19:47:32Z | |
| dc.date.available | 2021-02-11T19:47:32Z | |
| dc.date.issued | 2017-11-20 | |
| dc.identifier.uri | http://hdl.handle.net/20.500.12749/12202 | |
| dc.description.abstract | El helicóptero 3GDL es un módulo didáctico de 3 grados de libertad que consta de un brazo largo pivotado sobre una base fija vertical, el cual a través de variaciones en el voltaje de dos motores brushless instalados en el extremo del brazo crean una fuerza de empuje que junto al contrapeso ubicado en el extremo contrario permiten controlar los ángulos de elevación (altura que alcanza el cuerpo del helicóptero), el cabeceo (cabeceo en torno al eje longitudinal del prototipo) y el viaje (giro en torno al eje perpendicular al suelo), utilizando 3 sensores, cada uno para registrar las variaciones en los tres ángulos a controlar. | spa |
| dc.description.tableofcontents | OBJETIVOS .......................................................................................................... 13 GENERAL .......................................................................................................... 13 ESPECÍFICOS ................................................................................................... 13 INTRODUCCIÓN ................................................................................................... 14 CAPITULO 1: HELICOPTERO 3GDL ................................................................... 15 1.1 Modelo matemático .................................................................................. 17 1.1.1 Ecuaciones de movimiento ................................................................ 17 1.1.1.1 Eje de cabeceo ............................................................................ 18 1.1.1.2 Eje de elevación .......................................................................... 18 1.1.1.3 Eje de viaje .................................................................................. 22 1.1.2 Modelo de unidad de propulsión ........................................................ 23 1.1.3 Resumen de las ecuaciones .............................................................. 24 1.2 Diseño Mecánico ...................................................................................... 25 1.2.1 Dimensionamiento.............................................................................. 26 1.2.2 Parámetros del sistema ...................................................................... 32 1.2.3. Diseño y análisis del eje de elevación ............................................... 33 1.2.4 Diseño y análisis del eje de cabeceo ................................................. 36 1.2.5 Diseño y análisis del eje de viaje ....................................................... 42 1.3 Diseño electrónico .................................................................................... 44 1.3.1 Sensores ............................................................................................ 44 1.3.1.1 Filtrado de las señales de sensores ............................................ 45 1.3.1.2 Caracterización de sensores ....................................................... 46 1.3.1.3 Ajuste de offset control de viaje ................................................... 51 1.3.2 Motores .............................................................................................. 54 1.3.2.1 Caracterización motores .............................................................. 55 1.3.3 Sistema de adquisición de datos ........................................................ 56 1.3.4 Circuitos ............................................................................................. 57 1.4 Prototipo final ............................................................................................ 60 1.4.1 Modelo final en software CAD y modelo final en físico ....................... 60 CAPÍTULO 2: CONTROL ...................................................................................... 61 2.1 Control clásico PID ................................................................................... 61 2.1.1 Estrategia de control en cascada ....................................................... 61 2.1.1.1 Estrategia de control en cascada PID (1GDL) ............................. 62 2.1.1.2 Estrategia de control en cascada PID (2GDL) ............................. 63 2.1.2 Espacio de estados del sistema ......................................................... 64 2.1.3 Puntos de equilibrio ............................................................................ 65 2.1.4 Linealización del modelo en espacio de estados ............................... 67 2.1.5 Modelo lineal en espacio de estados en discreto: .............................. 69 2.1.6 Comparación modelo lineal y no lineal ............................................... 71 2.1.6.1 Limitaciones a la salida de los controladores .............................. 72 2.1.7 Controladores PID (1GDL) en tiempo discreto ................................... 73 2.1.8 Controladores PID (2GDL) en tiempo discreto ................................... 76 2.2 Control robusto QFT (Quantitative-Feedback-Theory).............................. 80 2.2.1. Concepto de incertidumbre y robustez en el modelo. ....................... 81 2.2.2 Metodología de diseño según QFT .................................................... 82 2.2.3 Diseño de la estrategia de control robusto QFT mediante la Toolbox de Matlab® (QFTCT) ....................................................................................... 84 2.2.3.1 Modelo parametrizado ................................................................. 84 2.2.4 Diseño del lazo de elevación .............................................................. 88 2.2.4.1 Especificaciones de desempeño del controlador ......................... 88 2.2.4.2 Diseño del controlador para elevación ......................................... 92 2.2.4.3 Diseño del pre-filtro para elevación ............................................. 93 2.2.5 Diseño del lazo de cabeceo ............................................................... 95 2.2.5.1 Especificaciones de desempeño del controlador de cabeceo ..... 96 2.2.5.2 Diseño del controlador para cabeceo .......................................... 97 2.2.6 Diseño del lazo de viaje ..................................................................... 98 2.2.6.1 Especificaciones de desempeño del controlador de viaje ......... 100 2.2.6.2 Diseño del controlador para viaje .............................................. 101 2.2.6.3 Diseño del prefiltro para viaje .................................................... 101 2.2.6 Discretización de los controladores y prefiltros ................................ 102 CAPITULO 3: VALIDACIÓN DE LOS CONTROLADORES ............................... 103 3.1 Controladores PID ...................................................................................... 104 3.2 Controlador QFT sin corrección de OFFSET ............................................. 105 3.3 Controlador QFT ......................................................................................... 106 CONCLUSIONES ................................................................................................ 109 BIBLIOGRAFÍA ................................................................................................... 111 ANEXOS .............................................................................................................. 112 | spa |
| dc.format.mimetype | application/pdf | spa |
| dc.language.iso | spa | spa |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-nd/2.5/co/ | * |
| dc.title | Diseño de un sistema de control de posición de un helicóptero de tres grados de libertad (3GDL) | spa |
| dc.title.translated | Design of a three-degree-of-freedom (3GDL) helicopter position control system | spa |
| dc.degree.name | Ingeniero Mecatrónico | spa |
| dc.publisher.grantor | Universidad Autónoma de Bucaramanga UNAB | spa |
| dc.rights.local | Abierto (Texto Completo) | spa |
| dc.publisher.faculty | Facultad Ingeniería | spa |
| dc.publisher.program | Pregrado Ingeniería Mecatrónica | spa |
| dc.description.degreelevel | Pregrado | spa |
| dc.type.driver | info:eu-repo/semantics/bachelorThesis | |
| dc.type.local | Trabajo de Grado | spa |
| dc.type.coar | http://purl.org/coar/resource_type/c_7a1f | |
| dc.subject.keywords | Mechatronic | eng |
| dc.subject.keywords | 3GDL helicopter | eng |
| dc.subject.keywords | Unmanned aerial vehicles | eng |
| dc.subject.keywords | Control systems | eng |
| dc.subject.keywords | Automation | eng |
| dc.subject.keywords | Flight control | eng |
| dc.subject.keywords | Artificial intelligence | eng |
| dc.subject.keywords | Mechanic system | eng |
| dc.subject.keywords | Mechanical design | eng |
| dc.subject.keywords | Technological innovation | eng |
| dc.subject.keywords | Aerodynamic effects | eng |
| dc.identifier.instname | instname:Universidad Autónoma de Bucaramanga - UNAB | spa |
| dc.identifier.reponame | reponame:Repositorio Institucional UNAB | spa |
| dc.type.hasversion | info:eu-repo/semantics/acceptedVersion | |
| dc.rights.accessrights | info:eu-repo/semantics/openAccess | spa |
| dc.rights.accessrights | http://purl.org/coar/access_right/c_abf2 | spa |
| dc.relation.references | [1] Stenholm, E. B. (1 de Junio de 2015). Modelling & Control of a 3DOF Helicopter. Linköping, Suecia. | spa |
| dc.relation.references | [2] Diaz, A. B. (2010). Diseño y construcción de un helibot 3 DOF (Helicoptero de 3 GDL) como herramienta de investigación y desarrollo para el laboratorio de sistemas dinamicos e ingenieria del control. Bucaramanga, Santander, Colombia. | spa |
| dc.relation.references | [3] MathWorks. (2017). Diseño y utilización de filtros Kalman en Matlab y simulink. Obtenido de MathWorks: https://es.mathworks.com/discovery/filtros-kalman.html | spa |
| dc.relation.references | [4] RC Models Wiz: Essential Guide to Electric Speed Control Systems. Obtenido el día 10-11-2016 de URL: http://www.rcmodelswiz.co.uk/electronic-speed-controllers-esc/ | spa |
| dc.relation.references | [5] Circuitcalculator. (2016).Pcb trace width calculator. Obtenido el dia 05-05-2017 de URL: http://circuitcalculator.com/wordpress/2006/01/31/pcb-trace-width-calculator/ | spa |
| dc.relation.references | [6] Williams A. P. L. (2013) Análisis y comparación de sistemas de control PID y PID difuso en lógica reconfigurable. Universidad de Istmo. México. | spa |
| dc.relation.references | [7] Alfaro, V., Arrieta, O., & Vilanova, R. (2009). Control de Dos-Grados-de-Libertad (2-GdL) aplicados al "Benchmark" de Sistemas para controladores PID. Revista Iberoamericana de Automática e Informática Industrial, 59-67 | spa |
| dc.relation.references | [8] F. Rodríguez-Rubio and M.-J. López-Sánchez. (1996) Control Adaptativo y Robusto. Universidad de Sevilla. | spa |
| dc.relation.references | [9] Martínez, M. G. (2008). Síntesis de controladores robustos mediante el análisis de la compatibilidad de especificaciones e incertidumbres. Pamplona: Universidad de La Rioja. Servicio de publicaciones | spa |
| dc.relation.references | [10] González, F. J. V., Rodríguez, T. M. R., García, E. L., Pérez, E. M., & López, J. L. N. Aplicación del Control QFT Robusto a la Maniobra de Cambio de Rumbo de un Buque | spa |
| dc.relation.references | [11] C. H. Houpis, S. N. Sheldon, y J. J. D’Azzo, Linear Control System Analysis and Design: Fifth Edition, Revised and Expanded. CRC Press, 2003. | spa |
| dc.contributor.cvlac | González Acevedo, Hernando [0000544655] | * |
| dc.contributor.googlescholar | González Acevedo, Hernando [V8tga0cAAAAJ] | * |
| dc.contributor.orcid | González Acevedo, Hernando [0000-0001-6242-3939] | * |
| dc.contributor.scopus | González Acevedo, Hernando [55821231500] | * |
| dc.contributor.researchgate | González Acevedo, Hernando [Hernando-Gonzalez] | * |
| dc.subject.lemb | Mecatrónica | spa |
| dc.subject.lemb | Sistemas de control | spa |
| dc.subject.lemb | Automatización | spa |
| dc.subject.lemb | Control de vuelo | spa |
| dc.subject.lemb | Inteligencia artificial | spa |
| dc.subject.lemb | Sistema mecánico | spa |
| dc.subject.lemb | Diseño mecánico | spa |
| dc.subject.lemb | Innovación tecnológica | spa |
| dc.identifier.repourl | repourl:https://repository.unab.edu.co | spa |
| dc.description.abstractenglish | The 3GDL helicopter is a 3 degrees of freedom training module that consists of a long arm pivoted on a vertical fixed base, which through variations in the voltage of two brushless motors installed at the end of the arm creates a thrust force that together with the counterweight located at the opposite end, they allow control of elevation angles (height reached by the helicopter body), pitch (pitch around the prototype's longitudinal axis) and travel (rotation around the axis perpendicular to the ground), using 3 sensors, each one to record the variations in the three angles to be controlled. | eng |
| dc.subject.proposal | Helicóptero 3GDL | spa |
| dc.subject.proposal | Vehículos aéreos no tripulados | spa |
| dc.subject.proposal | Efectos aerodinámicos | spa |
| dc.type.redcol | http://purl.org/redcol/resource_type/TP | |
| dc.rights.creativecommons | Atribución-NoComercial-SinDerivadas 2.5 Colombia | * |
| dc.contributor.researchgroup | Grupo de Investigación Control y Mecatrónica - GICYM | spa |
| dc.contributor.researchgroup | Grupo de Investigaciones Clínicas | spa |
| dc.coverage.campus | UNAB Campus Bucaramanga | spa |
| dc.description.learningmodality | Modalidad Presencial | spa |
Ficheros en el ítem


Este ítem aparece en la(s) siguiente(s) colección(ones)

Excepto si se señala otra cosa, la licencia del ítem se describe como Atribución-NoComercial-SinDerivadas 2.5 Colombia